-
 By Calvin Wijaya
By Calvin Wijaya
- 21.12.2022
- Geodesi Kini

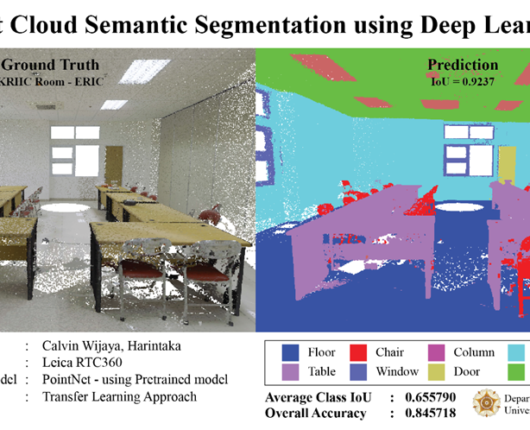
Point cloud adalah kumpulan titik (points) dalam ruang 3D dimana setiap titik memiliki koordinat ruang (XYZ) ditambah beberapa fitur lain seperti radiometrik atau warna (RGB) dan lain-lain. Point cloud menjadi salah satu format data yang penting untuk saat ini karena menjadi data dasar untuk representasi 3D dan implemetasinya yang beragam seperti robotik, virtual reality/ augmented reality dan autonomous driving. Selain itu, point cloud memiliki kelebihan dibanding format representasi 3D lain yakni mempertahankan geometrik asli atau original dari ruang 3D. Point cloud sendiri dapat diakuisisi menggunakan beberapa cara, seperti diturunkan dari pandangan stereo fotogrametri (metode Structure From Motion/ SFM atau secara Close-Range Photogrammetry) atau langsung diperoleh menggunakan peralatan laser scanner.
Seiring masifnya penggunaan BIM (Building Information Modelling) di industri AEC (Architecture, Engineering, Construction), kebutuhan akan informasi model dalam ruang 3D (3D Indoor Model)semakin meningkat. Hal ini dikarenakan model ruang memberikan informasi mendetail tentang objek-objek yang ada dalam ruang tersebut. Informasi ini kemudian dapat digunakan untuk rekonstruksi, dokumentasi, monitoring, pemeliharaan, kontrol kualitas hingga simulasi. Pemodelan ruang memberikan Digital Twin dari suatu ruang secara komprehensif, sehingga arsitek, insinyur atau manajer bangunan dapat saing berkolaborasi dalam mengakses informasi bangunan. Dengan kata lain, pemodelan ruang menjadi salah satu sumber informasi utama dalam mengelola dan manajemen bangunan. Geometri model ruang inilah yang dapat dipenuhi kebutuhannya menggunakan data point cloud.
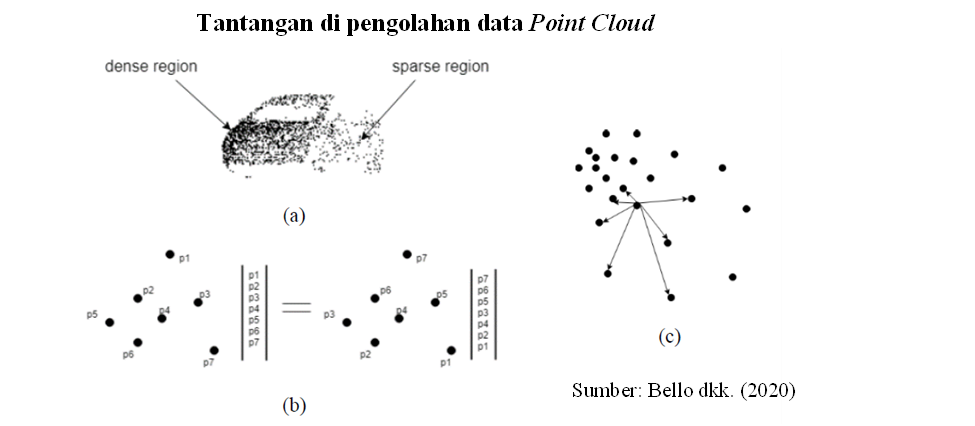
Pengolahan otomatis untuk klasifikasi data point cloud merupakan salah satu tantangan yang besar. Hal ini dikarenakan point cloud memiliki karakteristik tertentu yang sulit untuk diolah. Berbeda dengan format raster dimana format tersebut tersusun dari struktu yang relatif sederhana, dimana data dibagi ke grid terdiri baris dan kolom, perpotongannya adalah piksel yang berisi nilai. Susunannya teratur ke dalam bentuk grid, namun point cloud memiliki tingkat ketidakteraturan yang tinggi. Menurut Bello dkk. (2020), beberapa karakteristik point cloud yang menjadi tantangan dalam pengolahan adalah:
- Point cloud memiliki struktur, bentuk dan densitas yang tidk teratur. Hal ini ditunjukkan dalam 1 scan, terdapat bagiannya yang point cloud-nya rapat (dense), namun di bagian lain point cloud-nya renggang (sparse).
- Point cloud bersifat unorganized, tidak teratur seperti raster yang berada dalam format grid teratur. Tiap titik saling independent dan tidak bergantung satu sama lain, memiliki jarak yang bervariasi antar titik.
- Point cloud bersifat tidak berurutan (unordered). Susunan atau urutan list point cloud tidak mengubah bentuk point cloud ditampilkan. Contohnya jika ada 3 points yang membentuk segitiga dengan urutan list 1, 2, 3, maka apabila susunannya diubah menjadi 3, 1, 2 maka bentuk point-nya tetap akan membentuk segitiga walau susunanya berubah.
Dengan beberapa karakteristik point cloud tersebut, hal ini menjadi tantangan dalam hal melakukan pengolahan point cloud secara otomatis.
Beberapa algoritma Machine Learning dapat digunakan untuk mengklasifikasi atau mengelompokkan point cloud, seperti RANSAC (Random Sample Consensus) dan DBSCAN (Density Based Spatial Clustring of Application With Noise). Kedua algoritma tersebut pada dasarnya mengacu ke hubungan geometris antar point untuk mengklasifikasikannya. Artinya adalah melihat geometri seperti jarak antar point dan sebagainya. Klasifikasi point cloud dengan RANSAC diawali dengan algoritma ini akan memilih 3 points secara acak dan akan membentuk bidang, kemudian point-point lain akan dihitung jaraknya terhadap bidang yang dibentuk. Apabila jarak point berada dalam threshold tertentu maka dianggap sebagai satu bidang yang sama. Proses ini dilakukan iteratif. Sedang DBSCAN melihat ketetanggaan antar point, apabila point berada di area yang relatif berdekatan (dalam threshold) tertentu dengan point lain dan jumlahnya mencukupi batas minimm terbentuknya klaster maka point-point tersebut masuk dalam 1 kelas yang sama. Kedua algoritma ini juga dapat dikombinasikan satu sama lain.
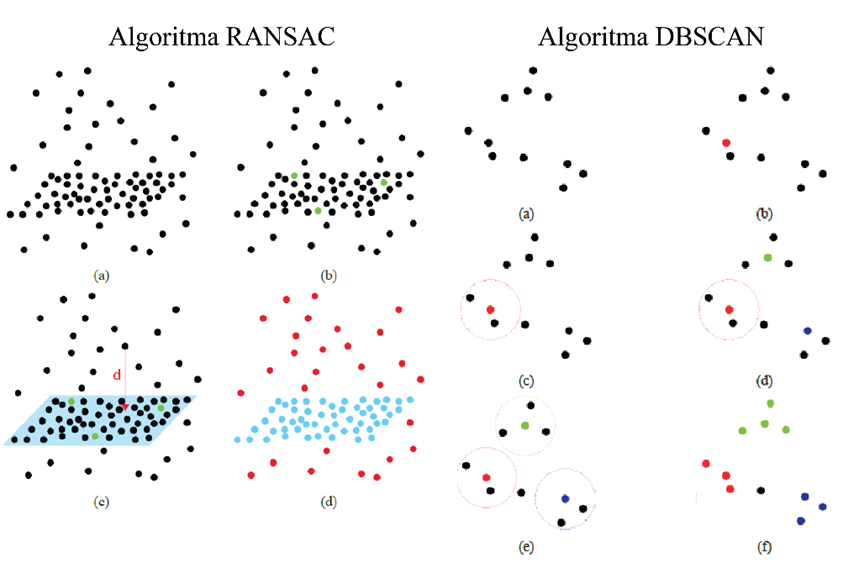
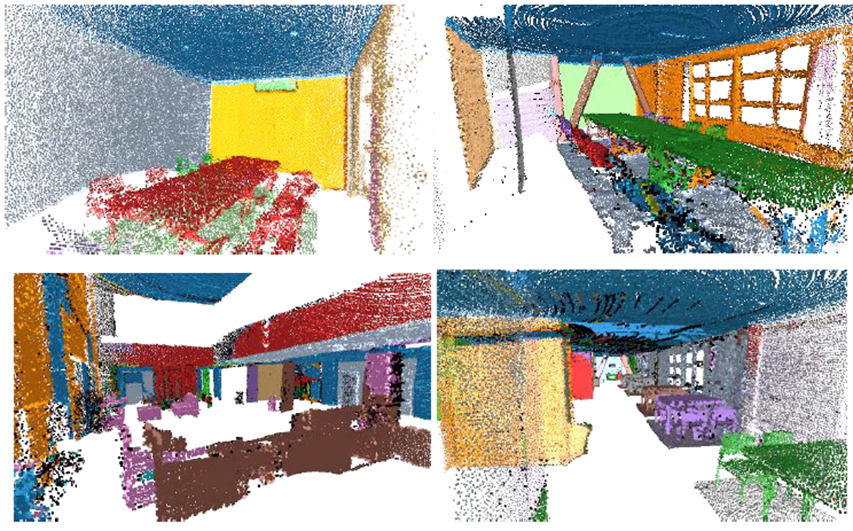
Point cloud hasil akuisisi laser scanner dan hasil close-range photogrammetry dalam ruang dapat digunakan menjadi input dari RANSAC dan DBSCAN. Proses segmentasi dan klasifikasi otomatis dilakukan secara looping dan iteratif. Artinya proses dilakukan secara berulang. Hasilnya menunjukkan bahwa ruangan yang memiliki geometri kecil dan relatif tidak komplek dapat diklasifikasi dengan baik. Namun pada ruangan yang luas dan kompleks, algoritma ini masih kesulitan untuk melakukan klasifikasi otomatis. Solusinya untuk ruangan yang terlalu luas atau kompleks adalah dengan membagi ruangannya menjadi beberapa bagian yang lebih kecil, dan masing-masing dilakukan klasifikasi otomatis. Pola dan geometri point cloud sangat mempengaruhi hasil yang diperoleh. Hal ini karena kebergantungan algoritma machine learning yang digunakan terhadap geometri point untuk melakukan klasifikasi. Dengan demikian semakin baik alat yang digunakan maka point yang dihasilkan lebih baik pula dan dapat menghasilkan output yang lebih akurat.
Bacaan lanjutan:
- Bello, S. A., Yu, S., Wang, C., Adam, J. M., & Li, J. (2020). Review: Deep learning on 3D point clouds. Remote Sensing, 12(11). https://doi.org/10.3390/rs12111729
- Liu, S., Zhang, M., Kadam, P., & Kuo, C.-C. J. (2021). 3D point cloud analysis : traditional, deep learning, and explainable machine learning methods. Springer International Publishing.
- Poux, F., Mattes, C., & Kobbelt, L. (2020). Unsupervised Segmentation of Indoor 3D Point Cloud: Application to Object-Based Classification. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences – ISPRS Archives, 44(4/W1), 111–118. https://doi.org/10.5194/isprs-archives-XLIV-4-W1-2020-111-2020