-
 By Mahmudi
By Mahmudi
- 01.08.2025
- Geospasial x AI
Geospatial Artificial Intelligence (GeoAI) adalah cabang interdisipliner yang mengintegrasikan kecerdasan buatan (artificial intelligence), ilmu data geospasial (geospatial data science), dan analitik spasio-temporal untuk mengotomatisasi ekstraksi pengetahuan, pemodelan, dan pengambilan keputusan cerdas berbasis geospasial dari data ber-georeferensi berskala besar dan kompleks. GeoAI memanfaatkan algoritma machine learning dan deep learning seperti Convolutional Neural Networks (CNN), Graph Neural Networks (GNN), dan Transformers untuk menganalisis dan otomatisasi fenomena bumi secara spasial dan temporal, yang direpresentasikan melalui citra satelit, GNSS (Global Navigation Satellite System), drone/aerial imagery, data LiDAR, laser scanner, sensor Internet of Things (IoT), images, video, dan sistem informasi geografis (GIS).
Inti konsep GeoAI:
- Spatial-aware learning: algoritma mampu memahami struktur ruang (topologi, jarak, bentuk).
- Temporal dynamics: menganalisis evolusi data berdasarkan waktu (time-series).
- Automated geospatial reasoning: membentuk penalaran spasial berbasis data dan konteks.
- Scalable AI models: dapat bekerja dengan data geospasial berukuran besar dan multi-resolusi.
Hingga 01 Agustus 2025, GeoAI telah menjadi bidang yang berkembang pesat dengan aplikasi di berbagai sektor seperti transportasi, telekomunikasi, energi, air, tata ruang wilayah/kota, digital twin, pertanahan, perpajakan daerah, manajemen dan penilaian aset, investment, pertahanan, keamanan, pertanian, lingkungan, klimatologi, meterologi, kehutanan, perkebunan, geologi, oil and gas, pertambangan, kesehatan, dan kebencanaan. Berikut adalah tinjauan state-of-the-art algoritma GeoAI berdasarkan perkembangan terkini:
- Convolutional Neural Networks (CNN)
- Vision Transformer (ViT)
- Graph Neural Networks (GNN)
- Algoritma untuk 3D Point Cloud
- Reinforcement Learning (RL) untuk Optimasi Spasial
- Spatio-Temporal Models
- Natural Language Processing (NLP) Spasial
- Random Forests dan Gradient Boosting
- Topological Mapping dan Manifold Learning
Kita kupas satu per satu.
1. Convolutional Neural Networks (CNNs): CNN tetap menjadi backbone untuk analisis citra satelit dan data geospasial. Arsitektur CNN digunakan untuk tugas seperti klasifikasi gambar, deteksi objek (misalnya, bangunan atau kendaraan), dan segmentasi semantik (misalnya, pemetaan penggunaan lahan). Perkembangan terbaru mencakup optimasi untuk menangani data geospasial beresolusi tinggi dengan efisiensi komputasi yang lebih baik. Berikut adalah rinciannya:
1.1. Semantic Segmentation, yaitu label tiap piksel dengan tujuan klasifikasikan setiap piksel ke kelas (jalan, sawah, bangunan, dll). Arsitektur CNN mencakup encoder-decoder, dilated CNN. Arsitektur dan algoritma mencakup: U-Net (struktur dengan pola U: kiri menurun → encoder (downsampling), tengah → bottleneck (fitur abstrak paling dalam), kanan menaik → decoder (upsampling), ditambah dengan skip connection), DeepLabV3 (CNN + ASPP – Atrous Spatial Pyramid Pooling), PSPNet (Pyramid Scene Parsing Network), FCN (Fully Conv Net: model DL pertama yang dirancang khusus untuk semantic segmentation). Backbone: ResNet (Residual Network), MobileNet, VGG (Visual Geometry Group), EfficientNet.
1.2. Object Detection, yaitu bounding box + kelas objek dengan tujuan deteksi dan beri label pada objek dalam citra. Arsitektur CNN mencakup CNN + Region Proposal / Grid. Arsitektur dan algoritma mencakup: R-CNN (Ekstraksi fitur → SVM per region), Fast R-CNN (ROI pooling → klasifikasi lebih cepat), Faster R-CNN (Tambah RPN (Region Proposal Network)), YOLOv3–v8 (Satu CNN langsung prediksi bbox & kelas), SSD (Single Shot: CNN + multi-scale anchor box), RetinaNet (Focal loss untuk objek kecil).
1.3. Instance Segmentation: arsitektur CNN mencakup Object Det. + Mask Branch, Arsitektur dan algoritma mencakup: Mask R-CNN (Faster R-CNN + cabang prediksi mask piksel) , YOLACT (Mask branch + deteksi cepat), SOLO / SOLOv2 (Segmentasi langsung per objek grid), CondInst (Conditional convolution per instance).
Fakta keren: CNN Backbone Paling Umum Digunakan
| Backbone CNN | Deskripsi Singkat | Ringan / Berat? |
|---|---|---|
| ResNet-50/101 | Fitur dalam + stabil |  Medium Medium |
| MobileNet | Ringan, cocok untuk device mobile |  Ringan Ringan |
| EfficientNet | Kuat & efisien (multi scale, depth, width) |  Optimal Optimal |
| VGG-16/19 | Lama, masih dipakai untuk edukasi |  Berat Berat |
2. Vision Transformers (ViTs): Transformer melalui papernya “Attention Is All You Need” (Vaswani et al., 2017), yang awalnya populer di arsitektur NLP dan dasar dari hampir semua LLM (Large Language Model) modern, kini diadaptasi untuk data geospasial. ViT menggantikan CNN tradisional dengan membagi citra menjadi patch kecil dan memperlakukannya sebagai urutan token (mirip dengan NLP), lalu diproses menggunakan self-attention. Dalam GeoAI, ini memungkinkan pemodelan konteks spasial-global yang lebih luas daripada CNN, fleksibilitas resolusi dan ukuran patch/citra, dan kemampuan adaptasi lintas domain seperti klasifikasi, segmentasi, object detection, dan change detection.
2.1. Vanilla Vision Transformer (ViT), tertuang dalam paper “An Image is Worth 16×16 Words” (Dosovitskiy et al., 2020), sebagai model dasar, digunakan sebagai baseline. Kekurangan: butuh banyak data dan komputasi besar, performa kurang di dataset kecil seperti citra geospasial terbatas.
2.2. Swin Transformer (Shifted Window Transformer), tertuang dalam paper: “Swin Transformer: Hierarchical Vision Transformer using Shifted Windows” (Liu et al., 2021). Fitur kunci: menggunakan window-based attention (lebih efisien dari full attention). Arsitektur hierarkis → mirip CNN, cocok untuk deteksi objek dan segmentasi. Use-case GeoAI: land cover classification (LC), crop type mapping, dan urban feature detection.
2.3. SegFormer, Tertuang dalam paper: “SegFormer: Simple and Efficient Design for Semantic Segmentation with Transformers” (Xie et al., 2021). Fitur kunci: encoder Transformer ringan, ecoder yang tidak bergantung pada positional embedding. Sangat SOTA dalam semantic segmentation untuk citra Sentinel-2, NAIP, dan UAV. Banyak digunakan untuk segmentasi tutupan lahan, dan monitoring perubahan spasial.
2.4. DETR (DEtection TRansformer) dan Varian GeoDETR, tertuang dalam paper: “End-to-End Object Detection with Transformers” (Carion et al., 2020). GeoDETR (DETR berbasis geospasial) adaptasi untuk data geospasial, mampu deteksi bangunan, jalan, dan fitur urban. Menghilangkan proposal-based pipeline → langsung prediksi box dan kelas.
2.5. ChangeFormer, tertuang paper: “ChangeFormer: A Transformer-Based Architecture for Change Detection” (Bandara et al., 2022). Use-case: Change detection dalam citra multi-temporal satelit (Sentinel-2, PlanetScope). Keunggulan: menggunakan dua cabang encoder untuk dua citra waktu berbeda, dan Attention untuk menyaring perubahan signifikan.
2.6. UperNet + ViT (Semantic FPN with Transformer). Kombinasi antara ViT backbone dengan Feature Pyramid Network (FPN) semantik. Digunakan dalam MMSegmentation (open-mmlab) dan geosegmentasi skala besar.
3. Graph Neural Networks (GNNs)
Graph Neural Networks (GNNs) dalam GeoAI sangat cocok karena data geospasial seringkali memiliki struktur topologi alami (misalnya jaringan jalan, kedekatan spasial, wilayah administratif). GNN mampu menggabungkan relasi spasial dan non-spasial, belajar representasi spasial dari graf (node = lokasi/region, edge = relasi spasial/topologis), dan menangkap pola interaksi antarwilayah, diffusi, dan dependensi spasial.
3.1. GCN – Graph Convolutional Network. Tertuang dalam paper “Semi-Supervised Classification with Graph Convolutional Networks” (Kipf & Welling, 2017). Arsitektur dan algoritma GCN melakukan konvolusi pada graf dengan average pooling dari tetangga node, dan relatif sederhana dan efisien. Use-case GeoAI: prediksi klasifikasi wilayah (urban, rural, industrial), zoning dan land use classification antar-node (desa/kecamatan). Dataset: openStreetmap graph, urban neighborhood networks, dll.
3.2. GraphSAGE – Graph Sample and Aggregate. Tertuang dalam paper “Inductive Representation Learning on Large Graphs” (Hamilton et al., 2017). Arsitektur dan algoritma GraphSAGE melakukan sampling tetangga dan agregasi learnable (mean, LSTM, pooling). Cocok untuk graf besar dan node feature heterogen. Use-case GeoAI: prediksi pertumbuhan wilayah urban, prediksi kualitas udara antar sensor spasial, estimasi populasi antar grid spasial.
3.3. GAT – Graph Attention Network (disingkat GAT, bukan GAN). Tertuang dalam paper “Graph Attention Networks” (Veličković et al., 2018). Arsitektur dan algoritma GAT menggunakan self-attention antar-node → menyesuaikan bobot tiap tetangga. Lebih fleksibel dibanding GCN, bisa memahami pengaruh spasial selektif. Use-case GeoAI: deteksi perubahan wilayah spasial (urban expansion), pemetaan dampak spasial bencana (banjir, gempa, kebakaran), bisa dipakai di GeoDETR (untuk deteksi objek spasial).
3.4. TGAT / T-GCN – Temporal GNNs. Arsitektur dan algoritma TGAT / T-GCN melakukan penggabungan GNN + time-series (misalnya untuk data spasial temporal) dan mampu menangkap evolusi spasial antar timestamp. Use-case GeoAI: prediksi traffic/jalur kendaraan, estimasi permintaan transportasi, forecasting NDVI, deforestasi, atau curah hujan antar grid.
3.5. ST-GCN – Spatial Temporal GCN. Arsitektur dan algoritma ST-GAN digunakan untuk spatiotemporal modeling → node = lokasi, edge = kedekatan spasial + temporal. Awalnya untuk skeleton action recognition, sekarang banyak dipakai di GeoAI. Use-case GeoAI: spatiotemporal air quality prediction. waktu tempuh antar titik geospasial, dan pergerakan urbanization.
3.6. Diffusion Convolutional Neural Network (DCNN). Tertuang dalam paper “Diffusion Convolutional Recurrent Neural Network: Data-Driven Traffic Forecasting” . Model berbasis diffusi informasi antar node seperti proses dinamis (contoh: penyebaran banjir, polusi). Use-case GeoAI: modeling spread of wildfire, disease, urban sprawl, dan river flow & hydrological networks.
3.7. GeoGNN / GeoSAGE / ST-GRAT (Geo-specific models). Beberapa GNN dikembangkan spesifik untuk GeoAI: model GeoSAGE melakukan gabungan attention-based GNN dengan side information geospasial, model GeoGNN melakukan eksplicitly model spasial proximity & geodesic distance sebagai edge, dan ST-GRAT (Graph Recurrent Attention) untuk model spatiotemporal.
Tools dan Library:
| Library | Fungsi |
|---|---|
| PyTorch Geometric (PyG) | Tool utama GNN, banyak GeoAI examples |
| DGL (Deep Graph Library) | Fokus GNN besar dan multimodal |
| TorchGeo + PyG | Kuat untuk GNN di domain geospasial |
| StellarGraph | Untuk spatial social network dan urban data |
Contoh Task GeoAI dengan GNN:
- Urban Sprawl Prediction – Node = grid kota, fitur = NDVI, populasi
- Flood Risk Graph – Node = area rawan banjir, edge = aliran sungai
- Spatiotemporal Traffic – Node = titik jalan, edge = rute koneksi, fitur = volume + waktu
- Air Pollution Forecasting – Sensor node, graph dari lokasi fisik + angin domina
3.8. Algoritma Graf Klasik
Algoritma graf klasik adalah sekumpulan metode komputasional yang dikembangkan berdasarkan prinsip-prinsip dalam teori graf, yaitu cabang matematika diskrit yang mempelajari hubungan antar objek melalui struktur simpul (vertex) dan sisi (edge). Algoritma ini digunakan untuk menyelesaikan berbagai permasalahan seperti penelusuran graf, pencarian jalur terpendek, deteksi siklus, dan pembentukan pohon merentang minimum. Contoh algoritma graf klasik meliputi Depth-First Search (DFS), Breadth-First Search (BFS), Dijkstra, Kruskal, dan PageRank. Peran algoritma ini sangat penting dalam mengaplikasikan konsep teori graf ke dalam konteks dunia nyata, seperti jaringan transportasi, sistem komunikasi, hingga analisis hubungan sosial.
3.8.1. Shortest Path (Jalur Terpendek), digunakan untuk mencari rute tercepat antar dua titik. Algoritma: Dijkstra (berbobot non-negatif), A* (heuristik + bobot), Bellman-Ford (untuk bobot negatif).
3.8.2. Minimum Spanning Tree (MST), digunakan untuk mencari jaringan koneksi minimum yang menghubungkan semua titik — berguna untuk jaringan distribusi (listrik, air, dll). Algoritma: Prim’s Algorithm, Kruskal’s Algorithm.
3.8.3. Connected Components, digunakan untuk mengecek apakah semua titik terhubung. Penting untuk analisis konektivitas wilayah atau infrastruktur.
3.8.4. Cycle Detection, digunakan untuk menemukan siklus dalam jaringan, seperti loop tertutup dalam jaringan air atau lalu lintas.
3.8.5. Centrality, analisis titik penting, misalnya: simpul persimpangan paling krusial dalam kota.
Info keren 1:
Dengan library networkx (bisa dibuka di JupyterLab), kamu bisa pakai:
-
Shortest path (Dijkstra, BFS):
nx.shortest_path(G, source, target) -
PageRank:
nx.pagerank(G) -
Komponen terhubung:
nx.connected_components(G) -
Minimum Spanning Tree:
nx.minimum_spanning_tree(G) -
Cycle detection:
nx.find_cycle(G)
Info keren 2: Algoritma-algoritma seperti Dijkstra, Minimum Spanning Tree, DFS/BFS, dll. adalah algoritma klasik dalam teori graf, bukan bagian dari Graph Neural Networks (GNNs). Tapi — keduanya berbasis struktur graf, dan saling melengkapi dalam konteks pemrosesan data graf.
| Aspek | Algoritma Graf Klasik | Graph Neural Networks (GNNs) |
|---|---|---|
| Tujuan | Pemrosesan graf eksplisit (misalnya pencarian jalur, MST, DFS) | Belajar representasi graf untuk prediksi |
| Input | Struktur graf eksplisit, seringkali kecil dan deterministic | Struktur graf + fitur node/edge |
| Teknik | Algoritma deterministik (Dijkstra, DFS, MST) | Deep learning berbasis propagasi fitur |
| Contoh tugas | Cari jalur terpendek, deteksi siklus | Prediksi label node, klasifikasi graf, link prediction |
| Kapan digunakan | GIS, routing, pemrosesan jaringan | Social network analysis, bioinformatics, rekomendasi |
4. Algoritma untuk 3D Point Cloud
3D point cloud merupakan representasi spasial objek atau lingkungan dalam bentuk titik-titik diskret di ruang 3D. Untuk mengolah dan mengekstraksi informasi dari data ini, berbagai algoritma telah dikembangkan dan diimplementasikan. Algoritma untuk 3D point cloud digunakan dalam berbagai aplikasi khususnya pemetaan 3D & kartografi, robotika, autonomous vehicles, augmented reality (AR) & virtual reality (VR), computer vision, dan digital twin. Algoritma ini bisa dikelompokkan berdasarkan fungsi atau tujuan pemrosesan. Berikut daftar lengkap dan sistematisnya:
4.1. Preprocessing
a. Filtering / Denoising
- Voxel Grid Filter: mengurangi jumlah titik dengan membuat grid 3D dan merata-ratakan titik di dalamnya (downsampling)
- Statistical Outlier Removal (SOR): menghapus titik yang dianggap noise berdasarkan distribusi statistik tetangga terdekat
- Radius Outlier Removal: menghapus titik yang memiliki tetangga sedikit dalam radius tertentu.
b. Normal Estimation
- Digunakan untuk memperkirakan arah permukaan lokal di sekitar tiap titik (misalnya via PCA).
4.2. Segmentation
a. Plane Segmentation
- Proses untuk mengekstraksi bidang datar (plane) dari data 3D seperti point cloud. Salah satu metode paling populer untuk tugas ini RANSAC (Random Sample Consensus), yaitu algoritma robust yang digunakan untuk mendeteksi permukaan datar, atau bidang dominan dalam data yang mengandung banyak outlier. Dalam konteks point cloud, RANSAC secara iteratif memilih subset titik secara acak dan mencocokkannya ke model bidang (plane), titik-titik lain diuji apakah termasuk inlier (berada dekat bidang) berdasarkan ambang batas Jarak, dan model dengan jumlah inlier terbanyak dianggap sebagai bidang terbaik.
b. Euclidean Cluster Extraction
- Metode segmentasi pada point cloud yang mengelompokkan titik-titik berdasarkan kedekatan spasial (jarak Euclidean). Berbeda dengan algoritma seperti k-means, metode ini: 1) tidak memerlukan jumlah klaster sebagai parameter awal, 2) memperhatikan konektivitas lokal, sehingga lebih cocok untuk data spasial diskrit seperti point cloud, 3) mengelompokkan titik-titik yang secara fisik berdekatan menjadi satu klaster, tanpa asumsi bentuk atau distribusi tertentu.
c. Region Growing
- Metode segmentasi yang dimulai dari satu atau lebih seed point, kemudian memperluas wilayah (region) dengan menambahkan piksel atau titik tetangga yang memenuhi kriteria kesamaan tertentu. Dalam konteks data geospasial atau point cloud 3D, kriteria umum yang digunakan adalah kesamaan normal vektor permukaan, kedekatan geometris (jarak Euclidean), dan terkadang juga intensitas atau warna.
4.3. Feature Extraction & Description
- FPFH (Fast Point Feature Histograms): ekstraksi fitur lokal dari neighborhood titik
- SHOT (Signature of Histograms of Orientations): fitur deskriptif lokal untuk kecocokan bentuk
- Spin Images: representasi 2D dari distribusi titik sekitar
4.4. Registration (Alignment)
a. Coarse Registration
- SAC-IA (Sample Consensus Initial Alignment): awal untuk pencocokan kasar berdasarkan fitur.
b. Fine Registration
- ICP (Iterative Closest Point): menyelaraskan dua cloud dengan meminimalkan jarak antar titik terdekat.
c. Global Registration
- Go-ICP, FGR (Fast Global Registration): registrasi global tanpa asumsi initial alignment.
4.5. Object Classification / Object Recognition
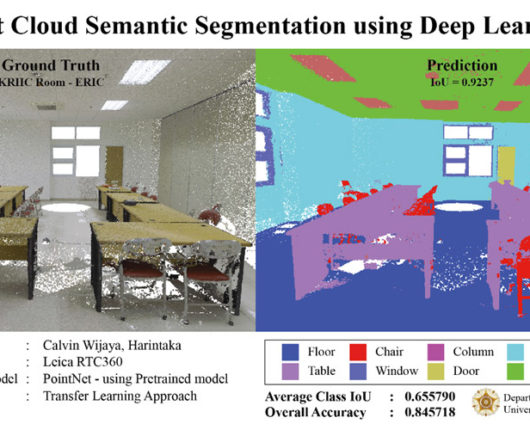
- PointNet / PointNet++: seluruh point cloud sebagai satu objek (global classification)
- DGCNN (Dynamic Graph CNN): model graph-based untuk capturing struktur lokal
- Point Transformer / PointNeXt: transformer-based architecture untuk point cloud.
4.7. Semantic Segmentation
- PointNet / PointNet++: per-point classification ke dalam kelas semantik
- KPConv (Kernel Point Convolution): CNN khusus untuk 3D data
- SPG (Superpoint Graph): segmentasi berbasis graph level yang efisien
- RandLA-Net: lightweight dan cepat untuk point cloud besar.
4.6. Surface Reconstruction
- Poisson Surface Reconstruction: mengubah point cloud jadi mesh
- Ball Pivoting Algorithm (BPA): metode geometrik untuk membuat mesh dari cloud
- Greedy Triangulation: triangulasi lokal berdasarkan neighborhood.
4.8. 3D Object Detection (khusus autonomous vehicle & robotika)
- Octree / KD-tree: struktur data spasial efisien
- Sparse Voxel Octree (SVO): representasi hierarkis dan kompak
- Point Cloud Codec (PCC): MPEG standard untuk kompresi point cloud.
4.9. Compression & Representation
-
Octree / KD-tree: struktur data spasial efisien
-
Sparse Voxel Octree (SVO): representasi hierarkis dan kompak
-
Point Cloud Codec (PCC): MPEG standard untuk kompresi point cloud.
4.10. SLAM (Simultaneous Localization and Mapping)
-
LOAM (Lidar Odometry and Mapping): mapping + tracking dengan LIDAR
-
LeGO-LOAM: optimasi dari LOAM, lebih ringan
-
Cartographer (Google): SLAM berbasis LIDAR dan IMU.
Tools & Library Terkait:
- PCL (Point Cloud Library): C++ library paling komprehensif
- Open3D: Python-friendly library, integrasi ML & 3D processing
- PyTorch3D: Untuk deep learning 3D point cloud
- MeshLab: GUI tool untukmanipulasi point cloud & mesh
- CloudCompare: Viewer & editor untuk 3D point cloud.
Algoritma pembelajaran penguatan (reinforcement learning) digunakan untuk menyelesaikan masalah optimasi spasial, seperti perencanaan rute
transportasi, alokasi sumber daya, atau desain smart city. Pendekatan ini memungkinkan sistem untuk belajar dari simulasi lingkungan geospasial, menghasilkan solusi yang adaptif dan efisien. Reinforcement Learning untuk optimasi spasial adalah pendekatan yang menggunakan prinsip pembelajaran agen-berbasis-pengalaman untuk menemukan solusi optimal dalam ruang yang bersifat spasial, seperti peta, jaringan jalan, penggunaan lahan, atau tata ruang kota. Optimasi spasial berarti mencari konfigurasi terbaik dalam ruang dua atau tiga dimensi dengan mempertimbangkan berbagai kendala spasial dan objektif tertentu. Use case-nya:
- Menentukan rute tercepat atau termurah (routing problem)
- Menempatkan fasilitas publik secara optimal (facility location)
- Zonasi lahan atau tata ruang kota (land-use planning)
- Perencanaan irigasi, pertanian, atau konservasi lingkungan
- Simulasi evakuasi atau distribusi logistik.
Apa itu Reinforcement Learning? Reinforcement Learning (RL) adalah paradigma machine learning di mana agen belajar dari lingkungan, agen melakukan aksi, lingkungan memberikan umpan balik (reward), dan tujuan agen adalah memaksimalkan reward kumulatif dengan strategi terbaik (policy). Bagaimana RL digunakan untuk optimasi spasial? Representasi masalah spasial sebagai lingkungan RL, dan optimasi spasial harus dimodelkan sebagai Markov Decision Process (MDP):
- State: kondisi spasial saat ini (misal, peta grid, status lahan, posisi agen, dsb.)
- Action: aksi spasial yang bisa dilakukan (memindahkan agen, mengubah zonasi, memilih rute)
- Reward: nilai dari aksi yang diambil (misalnya efisiensi energi, biaya rendah, konservasi maksimum)
- Policy: strategi yang digunakan agen untuk memilih aksi
Algoritma RL yang Sering Dipakai:
- Q-learning: untuk masalah diskret
- Deep Q-Network (DQN): untuk kondisi spasial kompleks (pakai CNN + Q-learning)
- Policy Gradient: untuk aksi kontinu
- Actor-Critic, PPO, A3C: untuk stabilitas dan efisiensi
- Multi-Agent RL: bila ada banyak agen di ruang spasial.
Kenapa RL Cocok untuk Optimasi Spasial?
- Adaptif terhadap dinamika lingkungan
- Tidak butuh supervisi eksplisit (unsupervised reward-driven learning)
- Cocok untuk masalah kombinatorial dan sekuensial (misal perubahan lahan waktu-ke-waktu)
- Dapat mengatasi constraint spasial secara fleksibel
| Masalah | Pendekatan RL | Tujuan |
|---|---|---|
| Routing kendaraan / perjalanan | Q-learning, DQN | Minimalkan jarak/tempuh biaya |
| Penempatan menara seluler | PPO, A2C | Maksimalkan cakupan sinyal |
| Tata ruang kota | Policy Gradient, Actor-Critic | Seimbangkan ekonomi dan lingkungan |
| Pengelolaan lahan pertanian | Multi-agent RL | Optimalkan hasil panen dan konservasi |
| Evakuasi bencana | MARL (Multi-Agent RL) | Minimalkan waktu evakuasi kolektif |
6. Spatio-Temporal Models
Spatio-temporal models adalah model atau metode yang dirancang untuk menangani data yang memiliki dimensi ruang (spasial) dan waktu (temporal) secara bersamaan. Artinya, model ini tidak hanya memperhatikan di mana suatu fenomena terjadi (lokasi), tapi juga kapan fenomena tersebut terjadi (waktu). Model ini sangat penting untuk memahami pola, dinamika, dan prediksi dari fenomena yang berubah-ubah dalam ruang dan waktu.
Karakteristik Data Spatio-Temporal:
- Spasial: memiliki lokasi geografis (misalnya koordinat, wilayah administratif, node dalam graf jalan)
- Temporal: berubah atau diukur secara berkala (misalnya setiap jam, hari, bulan)
Tujuan Spatio-Temporal Models:
- Prediksi: cuaca esok hari di lokasi tertentu, kepadatan lalu lintas jam berikutnya
- Klasifikasi: mendeteksi pola normal vs anomali dari pergerakan spasial (contoh: kebakaran, banjir)
- Pemahaman pola: melihat bagaimana suatu kejadian menyebar di ruang dan waktu (contoh: epidemi)
- Peta curah hujan harian (lokasi + waktu)
- Data lalu lintas di ruas jalan setiap 15 menit
- Suhu permukaan tanah tiap bulan dari satelit
- Persebaran penyakit menular di berbagai wilayah dari waktu ke waktu
| Model | Spasial? | Temporal? | Cocok untuk | Struktur Input |
|---|---|---|---|---|
| ConvLSTM | [V] Grid | [V] Time | Citra satelit, radar | Tensor 5D (B, T, H, W, C) |
| ST-GCN | [V] Graph | [V] Time | Sensor, jalan, sosial | Sequence of graphs |
| ST-Transformer | [V] All | [V]All | Prediksi kompleks | Spatio-temporal sequences |
| T-GCN | [V] Graph | [V] Time | Lalu lintas, energi | Graf + time-series |
7. Natural Language Processing (NLP) Spasial
Model GeoAI kini menggabungkan NLP untuk memprediksi lokasi berdasarkan teks, seperti analisis media sosial untuk mendeteksi kejadian bencana atau memetakan pola mobilitas manusia. Contohnya, model berbasis transformer dapat memproses laporan teks dan menghubungkannya dengan koordinat geospasial untuk analisis cepat. NLP spasial adalah pendekatan dalam pemrosesan bahasa alami yang menggabungkan informasi spasial/geografis untuk memahami, menginterpretasi, atau menghasilkan teks yang kontekstual terhadap lokasi tertentu.
NLP berbasis lokasi menggunakan data lokasi (misalnya koordinat GPS, nama tempat, wilayah administratif) untuk:
- menambah konteks geografis dalam analisis teks
- membuat sistem lebih “sadar lokasi”
- menghubungkan informasi tekstual dengan dunia nyata secara spasial.
| Aplikasi | Deskripsi |
|---|---|
| Geo-tagged Sentiment Analysis | Analisis opini publik dari tweet/ulasan yang memiliki metadata lokasi |
| Named Entity Recognition (NER) Geospasial | Mengenali dan mengklasifikasikan nama tempat, landmark, negara, kota |
| Geocoding dari Teks | Menyulap deskripsi lokasi dalam teks menjadi koordinat (misal: “dekat Monas” → koordinat) |
| Layanan Kontekstual | Chatbot atau asisten virtual yang merespons sesuai lokasi pengguna |
| Geo-aware Information Retrieval | Mencari informasi atau dokumen yang relevan secara spasial |
| Deteksi bencana berbasis teks dan lokasi | Menyaring laporan bencana dari media sosial real-time berdasarkan lokasi |
-
NLP Tools:
-
SpaCy, NLTK, BERT, RoBERTa, T5
-
Model NLP multibahasa dengan pre-training pada teks lokasi-aware
-
-
Data Geospasial:
-
Koordinat GPS, GeoJSON, OpenStreetMap, Google Places API
-
-
Integrasi NLP + Spasial:
-
GeoBERT / SpatialBERT (transformer-aware spatial embedding)
-
Lokasi sebagai fitur tambahan (location embedding)
-
Named Entity Linking ke gazetteer (misal GeoNames, Wikidata)
-
-
Visualization & Spatial Analysis:
-
Hasil NLP divisualisasikan di peta
-
Heatmap sentimen, distribusi entitas geografis
-
Deteksi sentimen netizen terhadap proyek infrastruktur di Indonesia:
- Dataset: tweet dengan tag lokasi
- Tools: sentiment Analysis + GeoJSON Mapping
- Output: peta persebaran opini per kabupaten/kota
Monitoring bencana alam:
- Dataset: tweet atau pesan laporan dari masyarakat
- Tujuan: ekstraksi lokasi + klasifikasi isi laporan
- Implementasi: NLP (klasifikasi teks) + geocoding
8. Random Forests dan Gradient Boosting
Selain deep learning, algoritma machine learning tradisional seperti Random Forests dan Gradient Boosting masih digunakan untuk tugas seperti
klasifikasi vegetasi atau prediksi banjir. Random Forests dan Gradient Boosting adalah ensemble learning method (metode kombinasi pembelajaran) yang terdiri dari sekumpulan algoritma (biasanya decision tree). Random Forest adalah metode ensemble learning berbasis bagging dengan menggunakan banyak decision tree sebagai algoritma dasarnya. Gradient Boosting adalah metode ensemble learning berbasis boosting dengan membangun pohon keputusan secara berurutan di mana setiap pohon baru berusaha memperbaiki kesalahan dari pohon sebelumnya.
Cara kerjanya: membangun banyak decision tree secara paralel, lalu melakukan voting (klasifikasi) atau rata-rata (regresi). Algoritma ini lebih ringan secara komputasi dan cocok untuk data geospasial dengan variabilitas rendah. Dalam konteks GeoAI, Random Forests dan Gradient Boosting termasuk ke dalam algoritma pembelajaran ensemble berbasis pohon keputusan (tree-based ensemble learning) yang banyak digunakan karena kemampuan mereka menangani data geospasial tabular dan citra dengan baik. Kedua pendekatan ini bisa digunakan untuk klasifikasi tutupan lahan, prediksi spasial, zonasi, analisis spasio-temporal, dll.
| Metode | Deskripsi Singkat |
|---|---|
| Random Forest (RF) | Kumpulan pohon keputusan (decision trees) yang dilatih secara independen dan voting mayoritas digunakan untuk prediksi. Fokus pada bagging. |
| Gradient Boosting (GB) | Pohon keputusan dibangun secara berurutan, di mana tiap pohon belajar dari kesalahan pohon sebelumnya. Fokus pada boosting. |
Berikut adalah beberapa implementasi algoritma turunan populer dari kedua pendekatan tersebut yang banyak digunakan di GeoAI:
Random Forest-based:
| Algoritma | Deskripsi |
|---|---|
| Random Forest (Breiman) | Versi klasik dari Leo Breiman, tersedia di scikit-learn, R, dll |
| Extra Trees (Extremely Randomized Trees) | Mirip RF tapi lebih random: split threshold dipilih acak, membuat model lebih cepat dan bervariasi |
| Geo-Random Forest | Modifikasi RF untuk memperhitungkan ketetanggaan spasial, cocok untuk data raster dan geostatistik |
| Spatial RF | RF ditambah fitur spasial eksplisit (misalnya jarak, koordinat X-Y, tetangga spatial lag) |
Gradient Boosting-based:
| Algoritma | Deskripsi |
|---|---|
| Gradient Boosting Machine (GBM) | Versi klasik (dari Friedman), tersedia discikit-learn |
| XGBoost | Versi GBM yang sangat efisien dan akurat, dukung handling missing data dan paralelisasi |
| LightGBM | Lebih cepat dari XGBoost, cocok untuk data besar dan high-dimensional |
| CatBoost | Cocok untuk data kategorikal dan tekstual, bisa digunakan untuk data spasial tabular |
| Spatial Boosting | Boosting yang mempertimbangkan variabel geospasial dan autocorrelation (masih banyak dikembangkan di riset akademik) |
Use Case:
| Use Case | Algoritma yang Umum Digunakan |
|---|---|
| Klasifikasi tutupan lahan | Random Forest, XGBoost |
| Prediksi nilai properti (real estate) | LightGBM, CatBoost |
| Prediksi banjir, longsor, kebakaran hutan | Random Forest, XGBoost, Spatial Boosting |
| Prediksi yield pertanian | Random Forest + variabel NDVI, EVI, dsb. |
| Interpolasi nilai lingkungan (misal: suhu) | Geo-Random Forest, kriging + RF |
Integrasi dengan Data Geospasial
- Untuk raster, data biasanya diekstrak jadi tabular (X, Y, nilai kanal) lalu dimasukkan ke RF/GB.
- Untuk data spasial vektor (seperti shapefile polygon), ditambahkan fitur spasial seperti:
- Koordinat centroid
- Elevasi
- Jarak ke sungai/jalan
- Tetangga spasial (spatial lag)
- Digabung dengan data satelit, DEM, NDVI, klasifikasi dari CNN, dll.
- Menyederhanakan data geospasial kompleks tanpa kehilangan struktur spasial.
- Memfasilitasi clustering, visualisasi, dan pemetaan spasial laten.
- Menjaga relasi lokal dan global dalam proses transformasi ruang.
Algoritma topological mapping:
- Self-Organizing Map (SOM), adalah sebuah algoritma unsupervised learning berbasis jaringan saraf buatan (artificial neural network) yang dirancang untuk melakukan clustering dan memetakan data berdimensi tinggi ke dalam ruang berdimensi lebih rendah—biasanya dua dimensi—dengan tetap mempertahankan struktur topologi dari data asli. Melalui proses pelatihan, SOM mengelompokkan data berdasarkan kemiripan fitur dan merepresentasikannya dalam bentuk peta dua dimensi, sehingga pola-pola dan hubungan antar kelompok (clusters) dapat divisualisasikan secara intuitif. Dengan demikian, SOM sangat berguna dalam tugas-tugas clustering, visualisasi, dan eksplorasi data kompleks tanpa label.. Sebagai metode dimensionality reduction, clustering, dan topological mapping, SOM banyak digunakan dalam eksplorasi data multivariat, visualisasi data kompleks, serta segmentasi spasial dalam berbagai domain termasuk bioinformatika, ekonomi, dan pemetaan spasial. Penerapannya, misalnya, digunakan untuk melakukan clustering zona penggunaan atau tutupan lahan, di mana data spasial yang kompleks dan berdimensi tinggi dapat dikelompokkan ke dalam zona-zona yang memiliki karakteristik serupa, sehingga mempermudah analisis dan interpretasi tahap lanjut.
- Uniform Manifold Approximation and Projection (UMAP), untuk menurunkan dimensi data spektral citar satelit sambil menjaga kontinuitas spasial. UMAP adalah algoritma manifold learning dan dimensionality reduction berbasis teori topologi dan graf, yang memproyeksikan data berdimensi tinggi ke ruang berdimensi lebih rendah dengan mempertahankan struktur lokal dan global. UMAP mengasumsikan bahwa data berada pada manifold riil dan membangun graf berbobot yang mencerminkan kedekatan antar titik, lalu mengoptimalkan embedding dengan menjaga struktur geometri manifold secara konstan di ruang rendah dimensi.
- Topological Graph, yaotu representasi graf berbobot atau tak berbobot yang merepresentasikan hubungan kedekatan atau keterhubungan antar entitas dalam ruang topologis, tanpa bergantung pada koordinat geometris absolut, melainkan pada struktur konektivitas antar node.
Manifold Learning dalam GeoAI adalah pendekatan untuk mempelajari representasi berdimensi rendah dari data geospasial berdimensi tinggi, dengan asumsi bahwa data tersebut berada pada manifold nonlinier di dalam ruang fitur yang kompleks.
Asumsi Utama:
- Data geospasial (misal: citra hiperspektral, point cloud, vektor spasial multivariat) hidup di atas manifold berdimensi lebih rendah.
- Struktur manifold mencerminkan pola laten spasial yang bermakna (misalnya, bentuk kontur, gradien vegetasi, zona iklim).
Tujuan:
- Reduksi dimensi dengan preservasi lokalitas dan struktur non-linier.
- Ekstraksi fitur laten yang mencerminkan karakteristik geospasial.
- Meningkatkan akurasi dan efisiensi model GeoAI downstream (klasifikasi, segmentasi, prediksi).
Algoritma manifold learning:
- t-distributed Stochastic Neighbor Embedding (t-SNE), adalah algoritma nonlinear dimensionality reduction yang mengonversi kemiripan antar titik data berdimensi tinggi menjadi probabilitas dan memetakkannya ke ruang berdimensi rendah dengan menjaga struktur lokal, menggunakan distribusi Student-t untuk menghindari crowding effect. Penerapan misalnya untuk mengelompokkan area berdasarkan pola spektral vegetasi.
- Isometric Mapping (Isomap), adalah algoritma manifold learning untuk nonlinear dimensionality reduction yang memperkirakan struktur manifold intrinsik dari data berdimensi tinggi dengan menggabungkan metrik jarak geodesik pada graf tetangga terdekat dan embedding multidimensi klasik (MDS). Penerapannya misalnya untuk menyusun ulang sekuens temporal perubahan tutupan lahan.
- Laplacian Eigenmaps, adalah algoritma nonlinear dimensionality reduction berbasis spektral yang membangun graf kedekatan lokal dari data dan memproyeksikan data ke ruang berdimensi lebih rendah dengan meminimalkan fungsi energi berbasis operator Laplacian graf, sehingga mempertahankan struktur lokal manifold. Penerapannya misalnya untuk menyarikan fitur spasial dalam topografi pegunungan.
| Aspek | Topological Mapping | Manifold Learning |
|---|---|---|
| Fokus | Relasi topologi (siapa tetangga siapa) | Struktur manifold laten nonlinier |
| Teknik | SOM, UMAP, Graph Mapping | t-SNE, Isomap, Diffusion Maps |
| Aplikasi | Clustering spasial, visualisasi grid | Reduksi dimensi, feature embedding |
| Kelebihan | Menjaga relasi spasial asli | Menangkap pola laten nonlinier |
| Peran di GeoAI | Analisis spasial adaptif | Ekstraksi fitur spasial efisien |
Referensi:
- https://grok.com
- https://asi1.ai
- https://chatgpt.com
- https://www.perplexity.ai
- https://www.sciencedirect.com/science/article/pii/S1569843225000159
- https://www.earthdata.nasa.gov/news/nasa-ibm-openly-release-geospatial-ai-foundation-model-nasa-earth-observation-data
- https://www.gov.uk/government/publications/geospatial-ai-for-land-use-by-the-alan-turing-institute/geospatial-ai-for-land-use-by-the-alan-turing-institute
- https://www.itc.nl/global-impact/geospatial-artificial-intelligence-geoai/
- https://www.esri.com/en-us/geospatial-artificial-intelligence/overview
- https://www.nianticspatial.com/campaigns/geospatial-ai-beyond-maps
- https://www.microsoft.com/en-us/research/project/geospatial-machine-learning/
- https://ignesa.com/how-ai-is-revolutionizing-geospatial-analysis/